美国科研人员研发出可远程控制的变形机器
来源:新华网
•
2019-08-07 10:34:52
美国《科学进展》杂志发表的一项最新研究显示,美国科研人员开发出一种可远程控制的变形机器人,未来有望在生物医学和航天领域得到应用。
这种机器人由嵌有磁铁微粒的聚合物构成,可受外部的光和磁场控制。在正常条件下,这种材料是相对刚性的,但通过发光二极管加热,材料会变得柔软,再通过磁场远程控制,可改变机器人的形状,而停止加热后,机器人会恢复刚性,固定为新的形状。
在测试中,美国北卡罗来纳州立大学和埃隆大学的研究人员将这种机器人制成用于提起和转运物体的“抓手”,也制成了悬臂。研究人员还将这种机器人折叠成了“花”,花瓣可以向不同的方向弯曲。
研究人员开发了一个设计软件,用于调整机器人形状、材料厚度以及磁场强度和方向等。
论文通讯作者、美国北卡罗来纳州立大学材料科学和工程学教授乔·特拉西说,可以远程控制机器人运动,并使其变化为特定形状,还能使其恢复原状并反复操作。这项技术未来有望在生物医学和航天领域得到应用。
相关推荐
-
 Android 12“App Pairs”功能:允许用户并排使用两个应用
Android 12“App Pairs”功能:允许用户并排使用两个应用
-
 NASA新火箭关键测试不幸失败 美登月计划或被迫推迟?
NASA新火箭关键测试不幸失败 美登月计划或被迫推迟?
-
 迅雷高速通道破解方法 迅雷高速通道如何破解
迅雷高速通道破解方法 迅雷高速通道如何破解
-
 ubuntu手机操作系统 手机版Ubuntu将给哪些人带来好处?
ubuntu手机操作系统 手机版Ubuntu将给哪些人带来好处?
-
 电脑开关机音乐下载 电脑开关机音乐设置教程
电脑开关机音乐下载 电脑开关机音乐设置教程
-
 去年12月中国手游发行商全球收入排名:腾讯第一
去年12月中国手游发行商全球收入排名:腾讯第一
-
 长城汽车申请新商标曝光啦!
长城汽车申请新商标曝光啦!
-
 网友晒“哈哈哈”频率 有的人居然一年哈了8.6万次
网友晒“哈哈哈”频率 有的人居然一年哈了8.6万次
-
 华硕x88s拆机教程 华硕x88s笔记本参数详解
华硕x88s拆机教程 华硕x88s笔记本参数详解
-
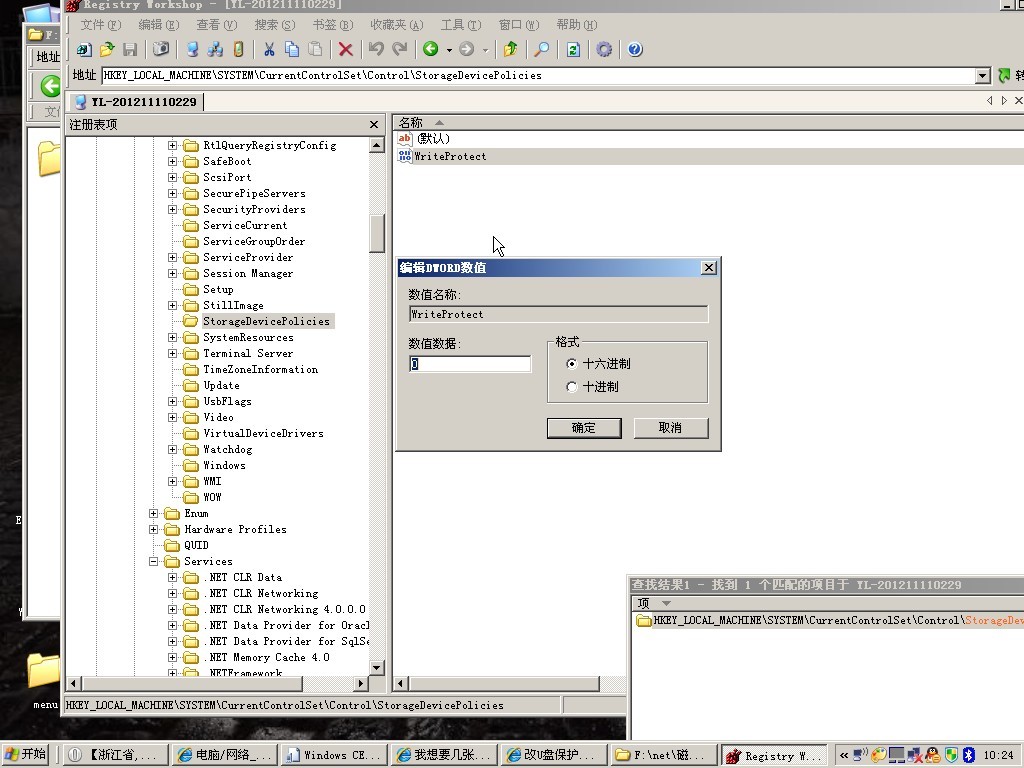 改U盘保护 详解“若没有StorageDevicePolicies项则
改U盘保护 详解“若没有StorageDevicePolicies项则
-
 摄像头安装程序安装步骤图文详解
摄像头安装程序安装步骤图文详解
-
 IE临时文件夹在哪?如何更改Internet临时文件夹位置?
IE临时文件夹在哪?如何更改Internet临时文件夹位置?
-
 快用苹果助手如何安装?安装不了究竟怎么回事
快用苹果助手如何安装?安装不了究竟怎么回事
-
 速看!金陵通介绍视频误曝光,Apple Pay 正测试支
速看!金陵通介绍视频误曝光,Apple Pay 正测试支
-
 联想旭日C430A-PX配置性能如何
联想旭日C430A-PX配置性能如何
-
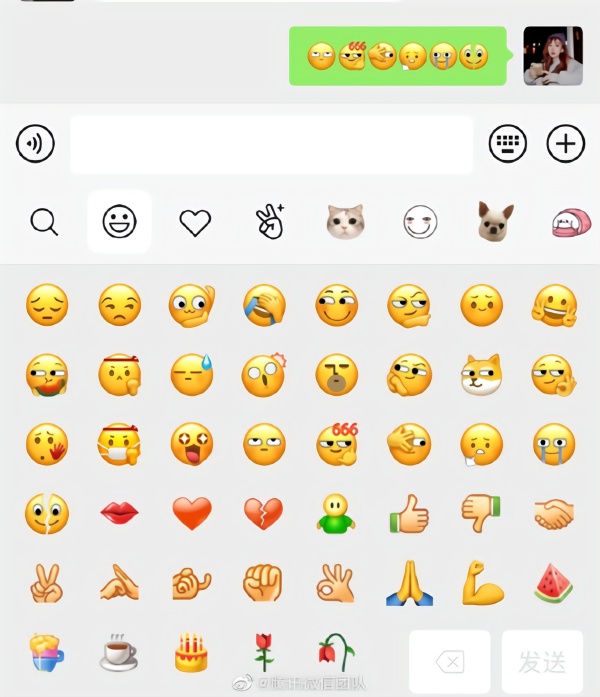 微信上线6个新表情 快更新看看
微信上线6个新表情 快更新看看
-
 2020中国软件百强榜单公布 华为蝉联第一
2020中国软件百强榜单公布 华为蝉联第一
-
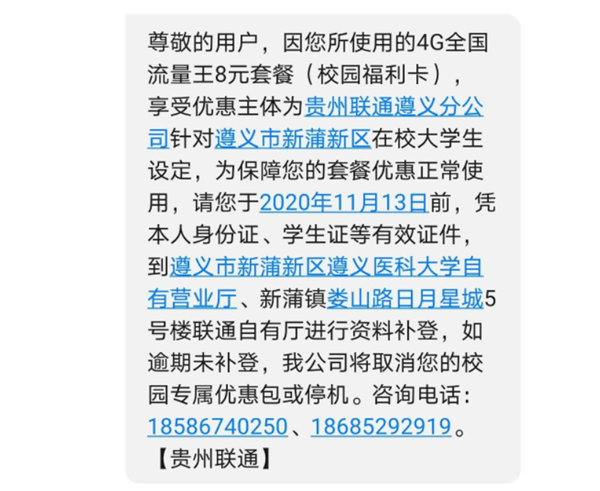 部分用户反映校园优惠套餐被叫停?联通解释:卡
部分用户反映校园优惠套餐被叫停?联通解释:卡
-
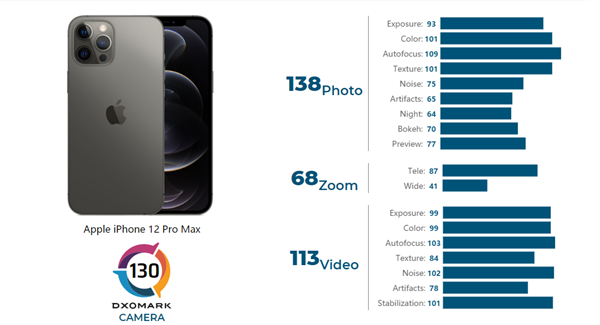 DXO公布iPhone 12 Pro Max评分:挑战Mate40 Pro输了
DXO公布iPhone 12 Pro Max评分:挑战Mate40 Pro输了
-
 李楠表示:iPhone 12 mini是工业设计之巅 Max版垫底
李楠表示:iPhone 12 mini是工业设计之巅 Max版垫底